遠藤 謙
Transboundary Research
 遠藤謙が2012年よりソニーCSLで取り組んでいる研究の一つに、足首部にモーターを搭載して、より人間の歩行に近い状態を再現する「ロボット義足」があります。
遠藤謙が2012年よりソニーCSLで取り組んでいる研究の一つに、足首部にモーターを搭載して、より人間の歩行に近い状態を再現する「ロボット義足」があります。
元々、二足歩行のヒューマノイドロボットを研究していた遠藤が義足の世界に興味を持つようになったのは2004年、親しい友人が骨肉腫を発症したことがきっかけでした。友人の役に立つ研究がしたいと願うようになっていた遠藤はその後、両足義足の米マサチューセッツ工科大学(MIT)メディアラボのヒュー・ハー教授の存在を知り、2005年にMITに留学、ロボット義足の研究を始めます。
ロボット義足は足首のところにモーターをつけて、人間の足の動きを再現します。歩き出す際に足にかかる力や足首の角度をセンサーが検知し、それに合わせてモーターが地面を蹴ったり、足首を伸ばしたり、戻したりという動きを人工的に作り出すのです。地面を蹴った時の跳ね返りが力として得られるので、従来の義足よりも歩行が楽になります。
02.png) 歩行が楽になるだけではありません。従来の義足は足首部分が動かないので、股関節の辺りから、足全体を無理矢理、前に持ってくることになり、歩く姿が不自然になってしまいます。足首の動きを再現できるロボット義足を付けることで、歩行中の見た目の違和感も低減できるのです。
歩行が楽になるだけではありません。従来の義足は足首部分が動かないので、股関節の辺りから、足全体を無理矢理、前に持ってくることになり、歩く姿が不自然になってしまいます。足首の動きを再現できるロボット義足を付けることで、歩行中の見た目の違和感も低減できるのです。
現在、遠藤はより日本人の身体に合う、軽量で小型なロボット義足の開発に取り組んでいます。「世の中には身体障害というものはない。ただ、テクノロジーに障害があるんだ」というハー教授の言葉は今も遠藤の原動力のひとつ。彼の見据える先には「健常者」と「障がい者」の境界線が曖昧になっている社会があります。そこでは、技術は障害を取り除くばかりか、人間の本来持つ能力自体を拡張する手段となっているかもしれません。
更に、遠藤は16年10月にスイス・チューリヒで開催される第1回「サイバスロン(Cybathlon)」競技会にもチームでエントリーしています。サイバスロンはスイス国立コンピテンスセンター・ロボティクス研究所(Swiss National Competence Centre of Research in Robotics)が主催する、”ロボット技術などを用いた高度な補装具を装着した競技者が競う大会”です。
 6種目の競技が予定されており、その中で遠藤のチームが参加するのは”Powered Leg Prosthesis Race (大腿義足を使用する競技)”です。競技者(Pilot)は傾斜や階段、扉などの障害物が設置されたコースを進んだり、ソファに座るなどの日常的な作業をこなしたりしてタイムを競います。この大会に向けて、遠藤が開発しているのは膝にモータを付けるタイプの義足です。
6種目の競技が予定されており、その中で遠藤のチームが参加するのは”Powered Leg Prosthesis Race (大腿義足を使用する競技)”です。競技者(Pilot)は傾斜や階段、扉などの障害物が設置されたコースを進んだり、ソファに座るなどの日常的な作業をこなしたりしてタイムを競います。この大会に向けて、遠藤が開発しているのは膝にモータを付けるタイプの義足です。
Transboundary Research
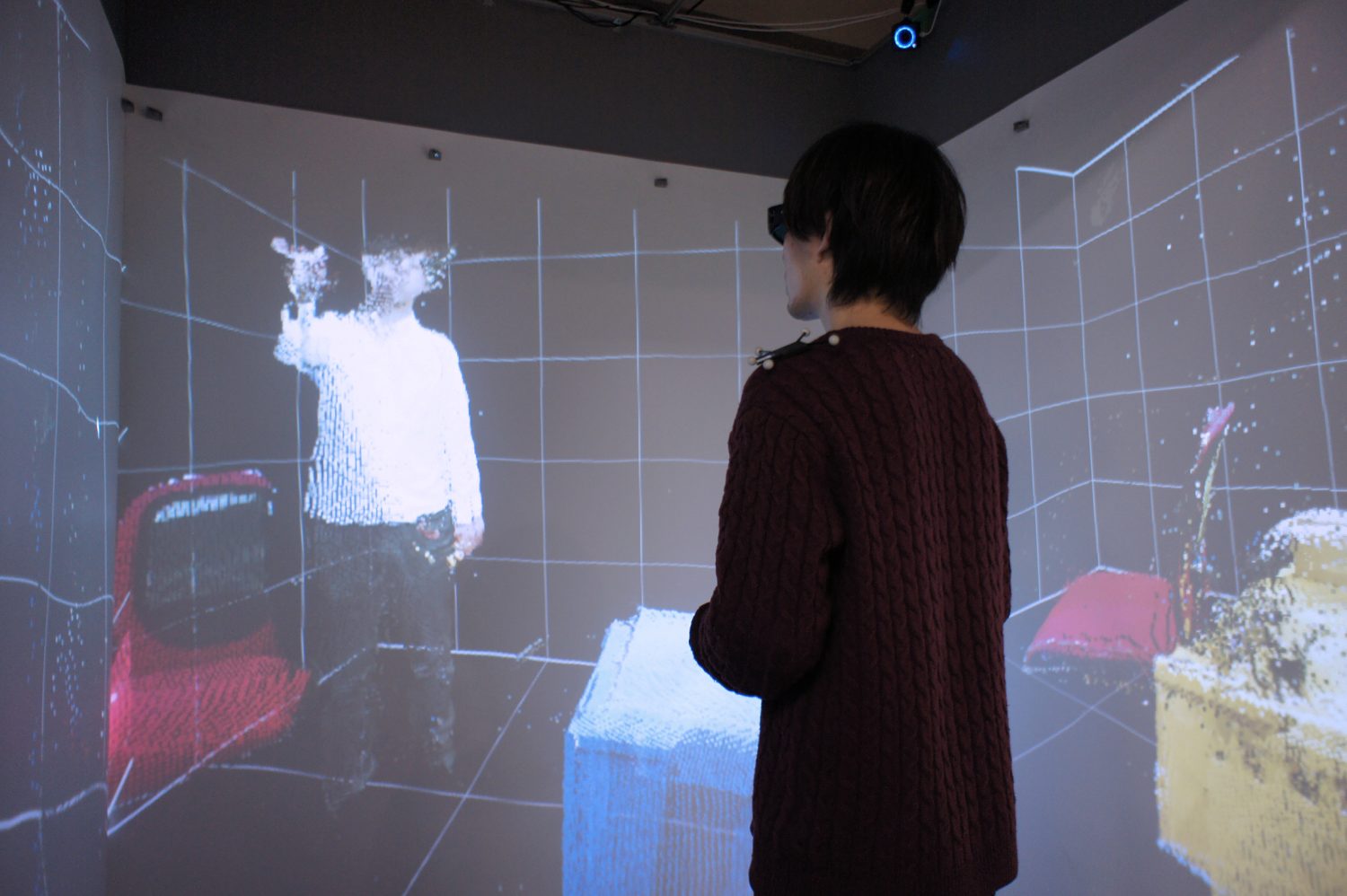
一人称映像と三人称映像の間を自由に移行できる枠組み
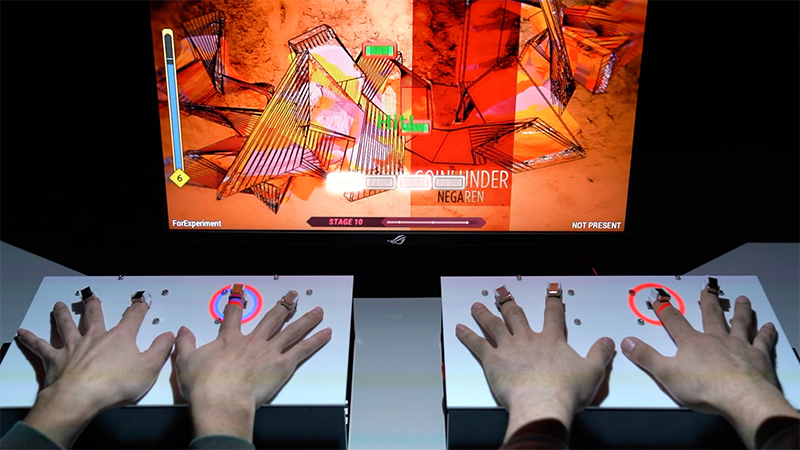
人間が相互に接続した状態で我々の知覚やコミュニケーションはどのように変容するのか?
機器同士をつなぐ直観的でわかりやすいインターフェース
人間ではない生き物の知覚世界をパーソナルプロジェクションマッピングによって体験できるシステム
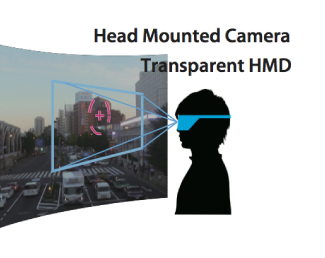
発展を続けるAR技術。その始まりは90年代ソニーCSLの研究でした。
Wi-Fi の電波で現在位置を推定するサービスの提供